User Tools
equipment:kukakr30
#00 Kuka KR 30 Industrial Robot Arm

Make/Model
- Kuka KR 30/2
Specs
 Literature inside enclosure door
Literature inside enclosure door Outside pendant enclosure
Outside pendant enclosure
 Inside pendant enclosure
Inside pendant enclosure Arm nameplate
Arm nameplate Arm motors (axes A1,A2,A3)
Arm motors (axes A1,A2,A3) Wrist motors (axes A4,A5,A6)
Wrist motors (axes A4,A5,A6) User interface
User interface Apparent robot name?
Apparent robot name?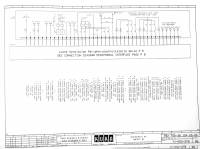 K921 Safety Circuit Diagram
K921 Safety Circuit Diagram










Current Status
Needs RepairNeeds to be mountedNeeds safety cage/wallsAutomatic mode proven- Wire safety switches into cabinet
Approved for use by
- MattN
Location
- West Room
Donated by
- An admirer
History
2013-06-15 - Arrived at Makerspace
2013-06-19: MattN
- Continuity tested on data cables between terminations at motors and data port box on robot.
- Power requirements determined, discussed with Tom Gr.
- PC booted up standalone/separately from control cabinet. Special thanks to Tony and Paul for this one.
- Connections for data/power/pendant noted on control cabinet
- need keyboard/mouse/monitor
- beginning formal discussion about physical location, I will submit a CAD drawing to BOD for tomorrow's meeting
- *Matt J. has a possible consultant available
Notes
- Internal connectors for control cables on the machine board are arranged in descending order from 8 to 1 (8 and 7 are unused on this machine)
- Software: Kuka KR C1 version 3.2.6 SP03 with kernel version KS V3.67
- Software to investigate (for milling)
Powermill by Delcam - http://delcam.com/Irbcam = http://www.irbcam.com/Mastercam + Robotmaster - http://mastercam.com/ and http://robotmaster.com/- Sprutcam generates toolpaths and robot code; tested and proven
- Best to do designs natively in AutoDesk Inventor
Robot Task Force
- MattN
- Paul S.
- Steve P.
- Joe R.
TO DO List
Clean the KukaMount the KukaName the KukaBuild a cage- Wire in E-stops/door switch
Test History
- Tested each data cable for shorts and opens
- No shorts and all pins measured 1-2 ohms
- All cables use the same pinout
- Cable for axis 2 has paint on the inside of the connector, but doesn't look like it affects operation
- Electronics cabinet has been completely powered up and appears functional. Need to override “fence open” signal
- T1, T2 modes work with deadman switches
- Automatic mode works with jumpered plug


QR Code
Don't have barcode reader? Click here.
equipment/kukakr30.txt · Last modified: 2014/05/05 16:01 by mattn
Except where otherwise noted, content on this wiki is licensed under the following license: CC Attribution-Share Alike 4.0 International
